3.1 ĪOúyńŅĶń
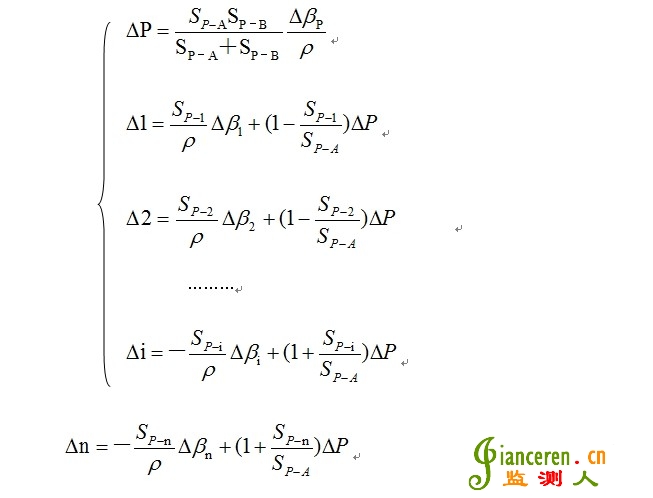
ĶōŤFĹ®≥…÷ģļů£¨‘ŕĪ£◊oÖ^∑∂áķÉ»£®ňŪĶņ∂őĪ£◊oÖ^∑∂áķěť
3.2 ĪOúyÉ»»›ļÕ∑Ĺ∑®
ĪO◊oĪOúy «ĶōŤFĪO◊oĻ§◊ųĶń“ĽāÄ÷ō“™≤Ņ∑÷,ŇcťL∆ŕĪOúyŌŗĪ»£¨ĪO◊oĪOúyĪOúy∑∂áķ”–Ōř£ĽĒĶďĢĆćērļÕĺę∂»“™«ůłŖ£Ľ◊É–őľįŖ^≥Ő≤ĽŅ…ŹÕ¨F£Ľ◊ųėI≠hĺ≥ņߎy£ĽňŪĶņÉ»üo∑Ä∂®ĶńĽýú Łc£ĽĻ§≥Ő∂ŗė”–‘ľįƶĶōŤF”įŪĎ≥Ő∂»Ķń≤ĽÕ¨Ķ»Ķ»ŐōŁc°£
ĪO◊oĪOúyńŅ«į÷ų“™ŖM––∂®őĽĪOúy°Ę≥ŃĹĶőĽ“∆ĪOúy°Ęňģ∆ĹőĽ“∆ĪOúy°ĘňŪĶņ ’ĒŅĪOúy°£
łųĪOúyŪóńŅ“ņĻ§≥ŐƶĶōŤFĶń”įŪĎ∑÷Ąe≤…”√»ňĻ§ĪOúyļÕ◊‘Ą”ĽĮĪOúyŖM––°£
»ňĻ§ĪOúy «≤…”√»ňĻ§Ķń∑Ĺ ĹĶÕÓl∂»ŖM––ĒĶďĢ≤…ľĮ°£∆š÷–≥ŃĹĶőĽ“∆ĪOúy≤…”√ňģú úyŃŅ∑Ĺ∑®£¨ňģ∆ĹőĽ“∆ĪOúy≤…”√ĹõĺēÉxúyŃŅĽÚÕ∂”į∑Ĺ∑®£¨ňŪĶņ ’ĒŅĪOúy≤…”√ĻŐ∂®÷ĪŹĹúyŃŅ∑®
◊‘Ą”ĽĮĪOúy «ĆĘ◊‘Ą”ĽĮĪOúyĶńÉx∆ų‘Oāšį≤—b‘ŕĪOúyÖ^”Ú∑∂áķÉ»ŖM––üo»ň÷Ķ ōĶńłŖÓl∂»◊‘Ą”ĒĶďĢ≤…ľĮ°£Õ®Ŗ^”–ĺÄĽÚ’ŖüoĺÄĶń∑Ĺ Ĺāų›ĒĶĹŅō÷∆÷––ń£¨Źń∂ÝŖ_ĶĹĆćērĪOúyĶńńŅĶń°£∆š÷–≥ŃĹĶőĽ“∆ĪOúy≤…”√žoѶňģú ÉxĽÚŽä◊”ňģ∆Ĺ≥Ŗ£¨ňģ∆ĹőĽ“∆ĪOúy≤…”√»ę’ĺÉxėO◊Ýėň◊‘Ą”ĽĮĪOúy
3.3ĪOúyĺę∂»“™«ů
“Ľį„Ļ§≥Őįī1.4ól“é∂®ŖM––£¨ī©‘ĹĻ§≥Őįī°∂≥« –‹ČĶņĹĽÕ®Ļ§≥ŐúyŃŅ“é∑∂°∑18.1.8ól“é∂®£¨◊É–őĪOúyĺę∂»įīĘŮĶ»“™«ůŖM––,∆šłųŪó÷łėňěť
◊É–őŁcĶńłŖ≥Ő÷–’`≤Óěť±
ŌŗŗŹ◊É–őŁcĶńłŖ≤Ó÷–’`≤Óěť±
◊É–őŁcĶńŁcőĽ÷–’`≤Óěť±
3.4ĪOúy∑∂áķ
ĶōŤF÷‹ŖÖ ©Ļ§ĶńĽýŅ”ŇcĶōŤFĶńīĻ÷ĪÕ∂”įőĽ÷√Õ‚—”…ž»żĪ∂ ©Ļ§…Ó∂»ĶńÖ^”ÚěťĶōŤFĪO◊oĪOúyĶń∑∂áķ°£
3.5 ĪOúyŁc¬Ů‘O
£®1£© ≥ŃĹĶőĽ“∆ĪOúyŁc£ļ‘ŕÕ∂”į∑∂áķÉ»įīťgĺŗ
£®2£©ňģ∆ĹőĽ“∆ĪOúyŁc£ļőĽ÷√Ňc√‹∂»įīĻ§≥ŐŐōŁc≤ľ‘O,Ķņī≤…ŌĪOúyŁcŅ…ņŻ”√≥ŃĹĶĪOúyŁcŅŐģč«ŚőķĶńėň”õ£¨“‘īň◊ųěťňģ∆ĹőĽ“∆ĪOúyĶńőĽ÷√°£
£®3£©ňŪĶņ ’ĒŅĪOúyŁc¬Ů‘O
ĪO◊oĪOúyērňŪĶņ ’ĒŅĪOúy≤…»żĻŐ∂®Ć¶ŹĹúyŃŅ∑®°£
ƶŹĹŁcőĽ÷√£ļ
–°÷ĪŹĹ£ļ—ŁŅp…ŌĽ°ťLľs
ōQŌÚ÷ĪŹĹ£®ÉŰŅ’£©£ļňŪĶņōQŌÚ÷––ńĺÄ
»żĻŐ∂®Ć¶ŹĹÉ…∂ňĺý‘O÷√ĻŐ∂®ėň÷ĺĽÚ’≥ŔN»ę’ĺÉx∑ī…šņ‚ÁR∆¨°£
É…∂ňőĽ÷√Ņ…ĹŤ÷ķ”–ôC≤£Ńß≤ńŔ|ľ”Ļ§ĶńĆ£”√›o÷ķĻ§ĺŖėň∂®°£
3.6 ĪOúyĻ§◊ųĶńĆć ©
∂®őĽĪOúy∑÷∂ĢŽA∂őŖM––
©Ļ§∑ĹįłľľĆŹŽA∂ő“ņďĢ‹ČĶņĹĽÕ®ŅĘĻ§ŔYŃŌ(ĽÚ¨F†ÓŔYŃŌ)ļÕ ©Ļ§Ņā∆Ĺ√śŔYŃŌŖM––£¨»°Ķ√ ©Ļ§Ļ§≥Ő◊ÓÕ‚ā»ĹYėčŇc‹ČĶņĹĽÕ®ĺÄĹYėčťgŌŗƶÍPŌĶĒĶďĢ£¨◊ųěťĪO◊oľľĆŹĻ§◊ųĶń“ņďĢ÷ģ“Ľ°£
¨F†ÓŔYŃŌ–ŤŖM––Ććúy£¨ĆćúyērĎ™ Ļ”√Õ¨“Ľ∆Ĺ√ś◊ÝėňļÕłŖ≥ŐŌĶ£¨Ď™”√∂ĢľČĆßĺÄļÕąDłýňģú ŖM––Ććúy
©Ļ§Ćć ©ŽA∂ő
“ņďĢ¨F†ÓŔYŃŌļÕ ©Ļ§ŔYŃŌ”čň„ ©Ļ§Ö^”Ú‘ŕ‹ČĶņĹĽÕ®ĺÄĶńÕ∂”įőĽ÷√ľįŌŗĎ™Ķń◊Ýėň°ĘņÔ≥Ő°Ę≠hŐĖ£¨”…īňī_∂®ĪO◊oĪOúyĶń∑∂áķļÕī_∂®Ōŗƶ∑Ä∂®Ö^”Ú£¨ÉH”–◊ÝėňērĎ™‘ŕ‹ČĶņĹĽÕ®ĺÄÉ»ĆćĶō∑Ňė”Õ∂”įőĽ÷√
©Ļ§őĽ÷√ĆćĶōī_∂®ļůϙƶ ©Ļ§Ö^”ÚĶń‹ČĶņĹĽÕ®ĺÄā»ė∂őĽŖM––ĪO◊oŹÕļňī_’J£¨Ć¶”ŕī©‘Ĺ°ĘÚTŅÁ‹ČĶņĹĽÕ®ĺÄĶńĻ§≥ŐŖÄ–ŤŖM–– ©Ļ§łŖ≥ŐĽýŁcĶńŹÕļň
ĪO◊oŹÕļň∆Ĺ√ś“‘∂ĢľČĆßĺÄ°ĘīĻ÷Ī“‘ąDłýňģú “™«ůŖM––
ĪO◊oĪOúy∑∂áķŌŗƶ”–Ōř£¨“Ú∂ÝŇcťL∆ŕĪOúyŌŗĪ»£¨ĪO◊oĪOúyĶńīĻ÷ĪőĽ“∆ĪOúy”–∆šŐōŁc
A.Ľýú ŁcŖx»°ņߎy£¨ĪMŃŅŖxďŮŌŗƶ∑Ä∂®÷ģŐ飨Ľýú Łc“Ľį„≤ľ‘O‘ŕ”įŪĎ∑∂áķÕ‚īů”ŕ
B£ģňģú ĺĬ∑īů≤Ņ≤Ľ◊„
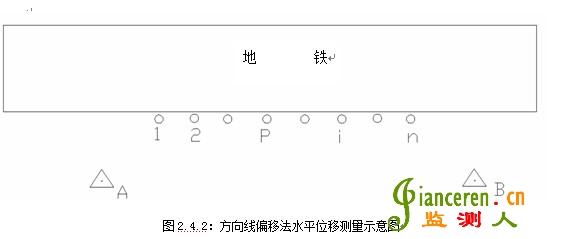
1.ňģú úyŃŅ∑Ĺ∑®
“Ľį„«ťõrŌ¬Ľýú ŁcĎ™‘ŕĪOúy∑∂áķĶń∂Ģ∂ň∑÷Ąe≤ľ‘O£¨√Ņ∂ň≤Ľ…Ŕ”ŕ2āÄŁc,ŁcťgĺŗĎ™≤Ľ–°”ŕ
≤…”√∂ĢĶ»ňģú úyŃŅĶń∑Ĺ∑®ŖM––≥ŃĹĶőĽ“∆ĪOúy£¨ňģú ¬∑ĺÄĎ™ť]ļŌĽÚłĹļŌ£¨ľľ–g“™«ůÖĘ’’ĪĺőńĶńĶŕ“Ľ’¬Ķŕ5ĻĚ°£
2.žoѶňģú ≥ŃĹĶőĽ“∆ĪOúy
žoѶňģú úyŃŅĶńĻ§◊ų‘≠ņŪ£¨ «ņŻ”√“ļůwÕ®Ŗ^ŖBÕ®Ļ‹, Ļ∂ŗāÄ»›∆ųĆć¨F“ļ√ś∆Ĺļ‚,úy∂®Ľýú Łc°Ę”^úyŁcĶĹ“ļ√śĶńīĻ÷ĪĺŗŽx,Ŗ@É…āÄīĻ÷ĪĺŗŽx÷ģ≤Ó,ĺÕ «É…ŁcťgĶńłŖ≤Ó°£
”√āųł–∆ųúyŃŅłų”^úyŁc»›∆ųÉ»“ļ√śĶńłŖ≤Ó◊ÉĽĮŃŅ£¨”čň„«ůĶ√łųúyŁcŌŗƶ”ŕĽýŁcĶńŌŗƶ≥ŃĹĶŃŅ
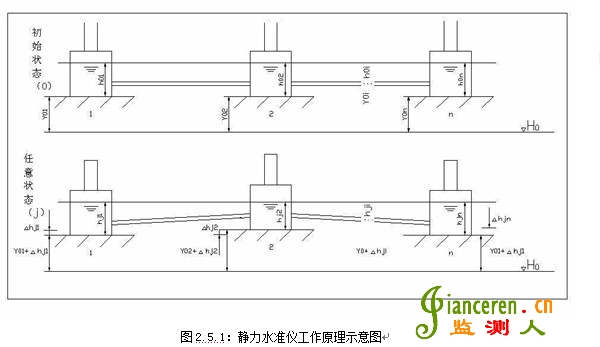

ņŻ”√Žä◊”ňģ∆Ĺ≥ŖŽäĹ‚“ļĹÁ√śĶń◊ÉĽĮŅ…úyŃŅĹYėčĶńĹ«őĽ“∆ŃŅĶń‘≠ņŪĀŪŖM––≥ŃĹĶőĽ“∆ĪOúy°£ĺŖůw≤Ŕ◊ų «ĆĘÉA–Īāųł–∆ųĻŐ∂®‘ŕ“ĽťL∂»ěťLĶń÷ßľ‹…Ō–ő≥…“ĽāÄŽäňģ∆Ĺ≥Ŗ£¨Žäňģ∆Ĺ≥Ŗį≤÷√ļůŅ…”…ÉA–Īāųł–∆ųúy≥ŲĹ«őĽ“∆ŃŅ裨Ąt‘ďŽäňģ∆Ĺ≥Ŗő≤∂ňŌŗƶ«į∂ňĶń≥ŃĹĶŃŅěť£ļΔh=θ* L
ģĒ»Űł…łýŽä◊”ňģ∆Ĺ≥Ŗ“ņīő ◊ő≤ŌŗŖBĹM≥…≥Ŗśúēr£¨ĶŕnłýŽäňģ∆Ĺ≥Ŗő≤∂ňŌŗƶ≥Ŗśú ◊∂ňĶń≥ŃĹĶŃŅěť
Hn=Δh1+Δh2+…………+Δhn
ΔhněťĶŕnłýŽäňģ∆Ĺ≥Ŗő≤∂ňŌŗƶ”ŕ«į∂ňĶń≥ŃĹĶŃŅ°£
≥Ŗśú ◊°Ęő≤É…∂ňĎ™‘O÷√‘ŕŌŗƶ∑Ä∂®Ö^”Ú£¨“ē◊ųĽýú Łc£¨»’≥£≥Ŗśúúy÷Ķ–Ť“ņÉ…∂ň일ýú ŖM––∆Ĺ≤Ó”čň„“‘ŐŠłŖ≥ŃĹĶőĽ“∆úyŃŅĺę∂»°£
Ď™∂®∆ŕ Ļ”√ňģú úyŃŅ∑Ĺ∑®ôzúy ◊°Ęő≤É…∂ňŌŗƶŌŗƶ≥ŃĹĶ«ťõr£¨“ēŌŗƶ≥ŃĹĶŃŅīů–°łŁ–¬Ľýú ĒĶďĢ
Žm”–∂ŗ∑Nňģ∆ĹőĽ“∆ĶńúyŃŅ∑Ĺ∑®Ņ…Ļ©Ŗx”√.Ķę‘ŕĶōŤFňŪĶņĶń¨FąŲ≠hĺ≥ļÕŖ\†IólľĢŌ¬ő®”–Õ∂”į∑®ļÕ◊Ýėň∑®Ī»›^Ŗm“ňļÕ≥£”√
1£©“ēú ĺÄÕ∂”į∑®
“ēú ĺÄÕ∂”į∑®ĽýĪĺĻ§◊ų‘≠ņŪ «”√ĹõĺēÉxĹ®ŃĘĽýú ĺÄ£¨úy∂®łų”^úyŁcĶĹĽýú ĺÄĶńĺŗŽx°£
‘ŕĪOúyÖ^”ÚÉ…∂ňľ‹‘OĹõĺēÉxĽÚ»ę’ĺÉx£¨‘ŕĪOúyÖ^”Ú∑ī∑ĹŌÚĶń—”ťLĺÄ…Ō’’ú “Ľ∂®ŌÚŁc£¨–żřD“ĽĻŐ∂®Ĺ«∂»β£®ĪMŅ…ń‹∂ŗĶńŇcĪOúyŁcÕ®“ē£©£¨Ĺ®ŃĘ∆ū“ĽólĽýú ĺÄ°£‘ŕ‹ČĶņ…ŌĄĚ…Ō«Śőķ«“ľöĶń“£ę”◊÷£¨“‘īň◊ųěť‘ďŁc∆Ĺ√śőĽ“∆ĪOúyĶń≥ű ľőĽ÷√°£‘ŕ»’≥£ĪOúy÷–£¨≤…”√Õ¨ė”∑Ĺ∑®”^úy£¨–żřD“ĽĻŐ∂®Ĺ«∂»βļů£¨’’ú őĽ÷√Ňc“£ę”◊÷÷ģťgĶńĺŗŽxěť‘ďŁcňģ∆ĹőĽ“∆ĶńņŘ”č÷ĶD°£DŅ…“‘Õ®Ŗ^”őėňŅ®≥ŖŃŅúy°£
2£©–°Ĺ«∂»∑®
ľ‹’ĺļÕ∂®ŌÚ∑Ĺ∑®Õ¨Õ∂”į∑®£¨Ć¶√ŅāÄĪOúyŁcŖM––Ĺ«∂»”^úy£¨Õ®Ŗ^Ĺ«∂»Ķń◊ÉĽĮ”čň„ĪOúyŁcňģ∆ĹőĽ“∆◊ÉĽĮ°£
D=£®α/206265£©*L
∆š÷–£ļ
D——ĪOúyŁcňģ∆ĹőĽ“∆ņŘ”č÷Ķ
α——∆ęĹ«£®£ß£ß£©
L——ľ‹’ĺŁcĶĹĪOúyŁcĶńĺŗŽx£®mm£©
3£©∑ĹŌÚĺÄ∆ę“∆∑®Ņľ
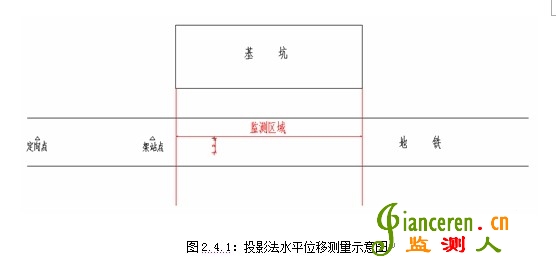
»ÁĻŻĪOúyĺĬ∑Ŗ^ťL£¨ĽÚĺĬ∑ŹĚĶņŖ^īů£¨Õ®Ŗ^É…∂ňľ‹’ĺüo∑®úyŃŅňý”–ĪOúyŁcēr£¨Ņ…≤…”√∑ĹŌÚĺÄ∆ę“∆∑®ŖM––ĪOúy°£
≤…”√∑ĹŌÚĺÄ∆ę“∆∑®Ć¶ňģ∆ĹőĽ“∆ĪOúyŁcŖM––◊É–ő”^úy°£»ÁąDňý ĺ£¨ AŁcļÕBŁcěťňģ∆ĹőĽ“∆ĪOúyŅō÷∆Łc°£
√ŅīőĪOúyēr£¨Ō»“™úyŃŅ∠APBĹ«Ķń◊ÉĽĮŃŅ£¨«ůĶ√PŁcĶńôMŌÚőĽ“∆ŃŅ£¨‘ŔúyŃŅ∠APiĹ«Ķń◊ÉĽĮŃŅ£¨Źń∂Ý«ůĶ√÷T”^úyŁciĶńôMŌÚőĽ“∆ŃŅ°£∆šłųŁcĶńôMŌÚňģ∆ĹőĽ“∆”čň„įīĻę Ĺ°£
ƶ”ŕ√Ņ“ĽāÄ ©Ļ§Ö^£¨‘ŕúy’ĺļÕőĽ“∆Łc‘O∂®ļů£¨ĺÕŅ…«ůĶ√łųŁc÷ģťgĶńĺŗŽx£¨Źń∂ÝŅ… ¬Ō»ň„Ķ√łųŁcŌĶĒĶ£¨“‘ļů÷Ľ“™úyĶ√Ĺ«∂»◊ÉĽĮ
4£©ÜőŇ_»ę’ĺÉxőĽ“∆ĪOúyŌĶĹy
ÜőŇ_»ę’ĺÉxőĽ“∆ĆćŔ|…Ō «◊‘Ą”ŖM––”^úyĶńėO◊ÝėňúyŃŅŌĶĹy°£
“‘ÜőŇ_TCA–Õ»ę’ĺÉxļÕŇšŐ◊”≤‹õľĢĹM≥…ĶńőĽ“∆ĪOúyŌĶĹyįŁņ®úyŁc°ĘÉx∆ų°ĘÕ®”ć°ĘĒĶďĢŐéņŪňńīů≤Ņ∑÷°£Ō¬ąDľīěť‘ďŌĶĹyĶńĽýĪĺĹM≥…£ļ
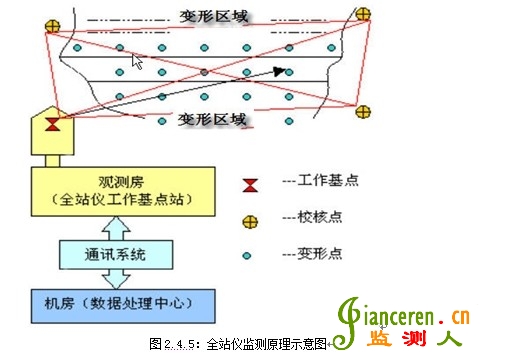
Ļ§◊ųĽýŁc…Ōľ‹‘O»ę’ĺÉx£¨“‘∂®ŌÚŁc∂®ŌÚļůúyŃŅ◊É–őÖ^”ÚÉ»Ķń◊É–őŁc£¨Ķ√ĶĹłųŁcĶń»żĺS◊Ýėň÷Ķ£®ĽÚěť∑ĹŌÚ÷Ķ°ĘĺŗŽx£©£¨Õ®Ŗ^”–ĺÄĽÚ’ŖüoĺÄĶń∑Ĺ ĹĆĘĒĶďĢāųĶĹĒĶďĢ÷––ń£¨ŖM––ĒĶďĢĶńŐéņŪ£¨Ķ√łų◊É–őŁcĶń◊Ýėň÷Ķ£¨Ňc«į“Ľ”^úy÷‹∆ŕ◊Ýėň÷ĶŌŗĪ»›^£¨Ķ√ĶĹłų◊É–őŁcĶńőĽ“∆ŃŅ£¨≤Ę…ķ≥…ąůĪŪ°£
ĪO◊oĪOúyērňŪĶņ ’ĒŅĪOúy≤…»żĻŐ∂®Ć¶ŹĹúyŃŅ∑®
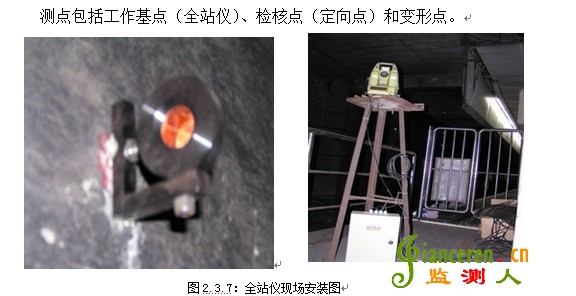
3.3÷–“— Ų“◊É–őŁcĶńŁcőĽ÷–’`≤Óěť±
ĻŐ∂®Ć¶ŹĹúyŃŅēr£¨÷√»ę’ĺÉx”ŕ≠h÷–≤Ņ°Ęúy∂®√Ņ“ĽĆ¶ŹĹÉ…∂ň∑ī…šŔN∆¨‘ŕÕ¨“Ľ◊ÝėňŌĶ÷–Ķń◊ÝėňXa°ĘYa°ĘZa°ĘXb°ĘYb°ĘZb£¨
∑īň„Ķ√ĶĹÉ…÷ĪŹĹ∂ňŁcĶń∆ĹĺŗDļÕłŖ≤Óh
ĆĘłųīő∆ĹĺŗúyŃŅ÷ĶŇc‘≠ ľ÷ĶŖM––Ī»›^£¨Ņ…“‘Ķ√ĶĹňŪĶņĶń‘ďƶŹĹ◊ÉĽĮ«ťõr°£
ĆĘłųīőłŖ≤ÓúyŃŅ÷ĶŇc‘≠ ľ÷ĶŖM––Ī»›^£¨Ņ…“‘Ķ√ĶĹňŪĶņĶń∆ęřD◊ÉĽĮ«ťõr